
Real-Time End-to-End Self-Driving Car Navigation
Keywords:
Self-driving car, deep neural network, embedded systems, end-to-end learningAbstract
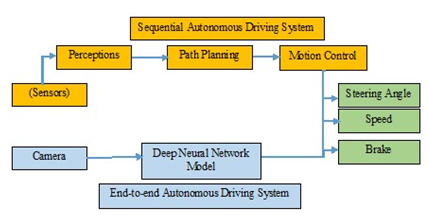
In this study, a deep neural network (DNN)-based vision-based navigation for autonomous vehicles is proposed. This novel DNN-based system obtains the data from a single camera to provide vehicle control outputs that modify both the steering wheel angle and the vehicle’s velocity. In addition, it plays a major role in safely navigating the vehicle in a road traffic environment. Numerous autonomous driving algorithms use end-to-end DNN, where camera data is fed into complex machine learning algorithms exclusively to estimate the steering angle value, but this research proposes a light-novel network model that controls both steering and speed values with much more simplicity. Various neural blocks are organized with the ultimate objective of producing control actions to achieve the aim of the research. Experimental modifications are made to parameters such as the number of convolutional layers, the model size, padding, stride, and the number of neurons in fully-connected layers to make the model simpler and lighter to execute during inference. Using an embedded system called Jetson Nano 2GB, the designed model was trained and tested using the images collected along two different paths. Our DNN-based autonomous driving system successfully predicts speed and steering values with a mean error of 1.58% and maintains performance, allowing for highly efficient autonomous driving. Furthermore, the suggested DNN network maintains performance, attaining autonomous driving success with comparable efficacy to the other autonomous driving models. The lightweight end-to-end architecture with superb performance is especially suited for autonomous driving.
Downloads
References
Y. Tian et al., “Lane marking detection via deep convolutional neural network,” Neurocomputing, vol. 280, pp. 46–55, Mar. 2018, doi: 10.1016/j.neucom.2017.09.098.
S. Z. Yong, D. Yershov, E. Frazzoli, B. Paden, and M. Cáp, “A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles,” IEEE Transactions on Intelligent Vehicles, vol. 1, no. 1. pp. 1–27, 2016.
S. Grigorescu, B. Trasnea, T. Cocias, and G. Macesanu, “A survey of deep learning techniques for autonomous driving,” J. F. Robot., vol. 37, no. 3, pp. 362–386, 2020, doi: 10.1002/rob.21918.
L. Li, K. Ota, and M. Dong, “Humanlike Driving: Empirical Decision-Making System for Autonomous Vehicles,” IEEE Transactions on Vehicular Technology, vol. 67, no. 8. pp. 6814–6823, 2018, doi: 10.1109/TVT.2018.2822762.
C. Chen, A. Seff, A. Kornhauser, and J. Xiao, “DeepDriving: Learning affordance for direct perception in autonomous driving,” Proceedings of the IEEE International Conference on Computer Vision, vol. 2015 Inter. pp. 2722–2730, 2015, doi: 10.1109/ICCV.2015.312.
M. Bojarski et al., “End to End Learning for Self-Driving Cars,” pp. 1–9, 2016, [Online]. Available: http://arxiv.org/abs/1604.07316.
Z. Yang, Y. Zhang, J. Yu, J. Cai, and J. Luo, “End-to-end Multi-Modal Multi-Task Vehicle Control for Self-Driving Cars with Visual Perceptions,” in 2018 24th International Conference on Pattern Recognition (ICPR), Aug. 2018, pp. 2289–2294, doi: 10.1109/ICPR.2018.8546189.
M. V. Smolyakov, A. I. Frolov, V. N. Volkov, and I. V. Stelmashchuk, “Self-Driving Car Steering Angle Prediction Based On Deep Neural Network An Example Of CarND Udacity Simulator,” in 2018 IEEE 12th International Conference on Application of Information and Communication Technologies (AICT), Oct. 2018, pp. 1–5, doi: 10.1109/ICAICT.2018.8747006.
J. Jhung, I. Bae, J. Moon, T. Kim, J. Kim, and S. Kim, “End-to-End Steering Controller with CNN-based Closed-loop Feedback for Autonomous Vehicles,” IEEE Intelligent Vehicles Symposium, Proceedings, vol. 2018-June. pp. 617–622, 2018, doi: 10.1109/IVS.2018.8500440.
D. Wang, J. Wen, Y. Wang, X. Huang, and F. Pei, “End-to-End Self-Driving Using Deep Neural Networks with Multi-auxiliary Tasks,” Automot. Innov., vol. 2, no. 2, pp. 127–136, Jun. 2019, doi: 10.1007/s42154-019-00057-1.
M. K. Islam, M. N. Yeasmin, C. Kaushal, M. Al Amin, M. R. Islam, and M. I. Hossain Showrov, “Comparative Analysis of Steering Angle Prediction for Automated Object using Deep Neural Network,” in 2021 9th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Sep. 2021, pp. 1–7, doi: 10.1109/ICRITO51393.2021.9596499.
D. P. Kingma and J. Ba, “Adam: A Method for Stochastic Optimization,” 2017 2nd IEEE Int. Conf. Cloud Comput. Big Data Anal. ICCCBDA 2017, pp. 156–160, Dec. 2014, doi: 10.1109/ICCCBDA.2017.7951902.
C. Sammut and G. I. Webb, Eds., “Mean Squared Error,” in Encyclopedia of Machine Learning, Boston, MA: Springer US, 2010, p. 653.
Y. Ghufran. "End-to-end self-driving car" YouTube, Sep 4, 2022 [Video file]. Available: https://www.youtube.com/watch?v=7HXkBrsrvOI. [Accessed: Sep 4, 2022]
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Yahya Ghufran Khidhir, Ameer Hussein Morad

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
All papers should be submitted electronically. All submitted manuscripts must be original work that is not under submission at another journal or under consideration for publication in another form, such as a monograph or chapter of a book. Authors of submitted papers are obligated not to submit their paper for publication elsewhere until an editorial decision is rendered on their submission. Further, authors of accepted papers are prohibited from publishing the results in other publications that appear before the paper is published in the Journal unless they receive approval for doing so from the Editor-In-Chief.
IJISAE open access articles are licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. This license lets the audience to give appropriate credit, provide a link to the license, and indicate if changes were made and if they remix, transform, or build upon the material, they must distribute contributions under the same license as the original.



