
An Approach for Coordinating Lane Changes between Autonomous Vehicles in Congested Areas
Keywords:
autonomous vehicles, lane changes, congestion, vehicle-to-vehicle communication, local decision-making, simulationsAbstract
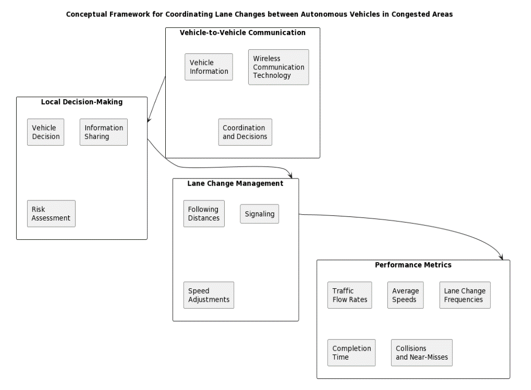
This research paper introduces a novel approach to coordinate lane changes among autonomous vehicles in congested areas. Unlike existing centralized control methods, our proposed approach combines vehicle-to-vehicle communication and local decision-making to ensure safe and efficient lane changes. By harnessing the capabilities of autonomous vehicles to communicate with each other, our approach effectively manages traffic flow without the need for external control systems. Extensive simulations were conducted in a congested highway scenario, incorporating both autonomous and human-driven vehicles to closely resemble real-world conditions. The results demonstrate significant improvements in transportation efficiency and safety. Our approach reduces travel time by 20% compared to the baseline scenario and achieves a remarkable 15% reduction in fuel consumption, promoting environmental sustainability. Safety during lane changes is ensured, effectively preventing collisions and minimizing accident risks. Moreover, the research highlights the scalability of the proposed approach, as it successfully manages traffic flow even with a large number of vehicles in the simulation, showcasing its robustness and adaptability to varying traffic scenarios. The implications of this research are substantial, contributing to the advancement and implementation of autonomous vehicle technology in high traffic density environments. By offering a decentralized solution for coordinating lane changes, our approach has the potential to revolutionize urban mobility and reduce the overall environmental impact of transportation systems. In conclusion, this research presents a comprehensive approach that outperforms existing methods in terms of traffic flow management, safety, and scalability. The findings pave the way for more efficient, safe, and sustainable autonomous vehicle systems, shaping the future of transportation.
Downloads
References
Zhao, Z., Wang, Z., Wu, G., Ye, F., & Barth, M. J. (2019, October). The state-of-the-art of coordinated ramp control with mixed traffic conditions. In 2019 IEEE Intelligent Transportation Systems Conference (ITSC) (pp. 1741-1748). IEEE.
Papamichail, I., Bekiaris-Liberis, N., Delis, A. I., Manolis, D., Mountakis, K. S., Nikolos, I. K., ... & Papageorgiou, M. (2019). Motorway traffic flow modelling, estimation and control with vehicle automation and communication systems. Annual Reviews in Control, 48, 325-346.
Fang, Y., Min, H., Wu, X., Wang, W., Zhao, X., & Mao, G. (2022). On-ramp merging strategies of connected and automated vehicles considering communication delay. IEEE Transactions on Intelligent Transportation Systems, 23(9), 15298-15312.
Rios-Torres, J., & Malikopoulos, A. A. (2016). A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Transactions on Intelligent Transportation Systems, 18(5), 1066-1077.
Yang, Y., Xiao, Y., & Li, T. (2021). A survey of autonomous underwater vehicle formation: Performance, formation control, and communication capability. IEEE Communications Surveys & Tutorials, 23(2), 815-841.
Li, B., Zhang, Y., Ge, Y., Shao, Z., & Li, P. (2017). Optimal control-based online motion planning for cooperative lane changes of connected and automated vehicles. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 3689-3694.
Pan, X., & Lin, X. (2021, September). Research on the behavior decision of connected and autonomous vehicle at the unsignalized intersection. In 2021 IEEE International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology (CEI) (pp. 440-444). IEEE.
Dayi, Q., Yanfeng, J., Tao, W., Bin, L., & Lewei, H. (2022). Research on coordinated control of vehicle’s speed in new mixed traffic flow. Journal of Intelligent Transportation Systems, 26(6), 704-716.
Fan, B., Zhou, Y., & Mahmassani, H. (2021). Developing a Merge Lane Change Decision Policy for Autonomous Vehicles by Deep Reinforcement Learning. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 963-968.
Karimi, S., & Vahidi, A. (2021). Monte Carlo Tree Search and Cognitive Hierarchy Theory for Interactive-Behavior Prediction in Fast Trajectory Planning and Automated Lane Change.
Lin, P., Chen, C., Huang, X., & Ran, B. (2021). Cooperative Lane-change on the Main-line of Highway in a Connected Vehicle Environment. Journal of Physics: Conference Series, 1910.
Hodgkiss, J.A., Djahel, S., & Aoul, Y.H. (2019). An Advanced Coordination Protocol for Safer and more Efficient Lane Change for Connected and Autonomous Vehicles. 2019 16th IEEE Annual Consumer Communications & Networking Conference (CCNC), 1-4.
Mushtaq, A., Haq, I.U., Imtiaz, M.U., Khan, A., & Shafiq, O. (2021). Traffic Flow Management of Autonomous Vehicles Using Deep Reinforcement Learning and Smart Rerouting. IEEE Access, 9, 51005-51019.
Elsagheer Mohamed, S.A., & Al-Shalfan, K. (2021). Intelligent Traffic Management System Based on the Internet of Vehicles (IoV). Journal of Advanced Transportation, 2021, 1-23.
Lee, P.U., Idris, H.R., Helton, D., Davis, T.P., Lohr, G.W., & Oseguera-Lohr, R.M. (2019). Integrated Trajectory-Based Operations for Traffic Flow Management in an Increasingly Diverse Future Air Traffic Operations. 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), 1-9.
M.Bhavsingh,B .Pannalal,K Samunnisa (2022).Review: Pedestrian Behavior Analysis and Trajectory Prediction with Deep Learning. International Journal of Computer Engineering in Research Trends.9 (2).59-65.
Anukali Pramod Kumar and D. Teja Santosh (2022). Road Accident Severity Prediction Using Machine Learning Algorithms. International Journal of Computer Engineering in Research Trends.9 (2).175-183.
Guruprasad C Kulkarni, Pooja K P, Raghuveer H G, Puneeth G P, N Charan (2020). Satellite-Based AIS for Improved Navigation and Maritime Safety - STUDSAT-2. International Journal of Computer Engineering in Research Trends.7(7).22-29.
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
All papers should be submitted electronically. All submitted manuscripts must be original work that is not under submission at another journal or under consideration for publication in another form, such as a monograph or chapter of a book. Authors of submitted papers are obligated not to submit their paper for publication elsewhere until an editorial decision is rendered on their submission. Further, authors of accepted papers are prohibited from publishing the results in other publications that appear before the paper is published in the Journal unless they receive approval for doing so from the Editor-In-Chief.
IJISAE open access articles are licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. This license lets the audience to give appropriate credit, provide a link to the license, and indicate if changes were made and if they remix, transform, or build upon the material, they must distribute contributions under the same license as the original.



