
Design and Implementation of a Controlled Interface Circuit for Autonomous Remote-Controlled Car
Keywords:
No KeywordsAbstract
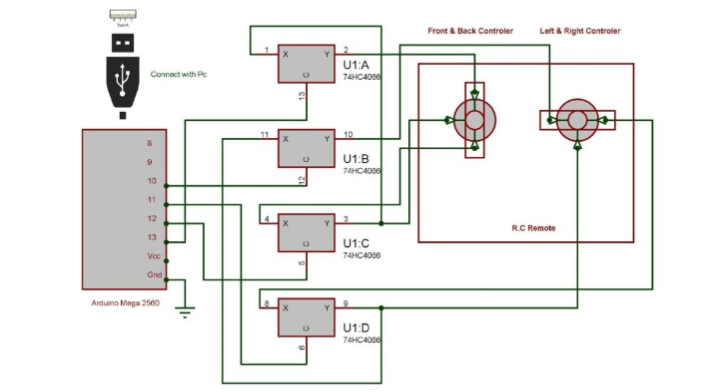
This paper has designed and implemented an electronic circuit and algorithm for interfacing an autonomous remote-controlled car (ARCC) with the computer. This interfacing prepares the conditions to study and analyse the controlled object and endow it with the ability to be smarter and intelligent when performing its duties. The ARCC will be guided through the commands issued by the computer. It is manually controlled by the operator directing the car to the destination. The interface circuit consists of an Arduino microcontroller, switch, and connections. The designed circuit's validation has been tested through simulation and practically on the real system. The simulation test was done under a C# software environment, while the practical test was done on the real car. The experiments describe the car's movement from the initial position to the destination position. These experiments showed that the average system response time is: (346.4 ms) when the ARCC moves front, (360.9 ms) when the ARCC moves back, (1393.23ms) when the ARCC turns left and (935.77ms) when the ARCC turns right. A graphical user interface (GUI) has been designed and implemented to facilitate controlling activities related to ARCC. The GUI is a control panel used to set the parameters of the ARCC environment to prepare it to receive commands.
Downloads
References
Ambros-Ingerson, J., & Steel, S. (1988). Integrating Planning, Execution and Monitoring. In J. Allen, J. Hendler, & A. Tate (Eds.), Proceedings of the Seventh National Conference on Artificial Intelligence AAAI88 (Vol. 1, pp. 83–88). Kaufmann.
Arduino. (n.d.). Retrieved July 31, 2022, from https://www.arduino.cc/
Beginners’ Guide. (n.d.). Retrieved July 31, 2022, from https://rcplanes.online/guide1.htm
Bohren, J., Rusu, R. B., Jones, E. G., Marder-Eppstein, E., Pantofaru, C., Wise, M., Mösenlechner, L., Meeussen, W., & Holzer, S. (2011). Towards autonomous robotic butlers: leasons learned with PR2. 2011 IEEE International Conference on Robotics and Automation, 5568–5575. https://doi.org/10.1109/ICRA.2011.5980058
Brenner, M., & Nebel, B. (2009). Continual planning and acting in dynamic multiagent environments. Autonomous Agents and Multi-Agent Systems, 19(3), 297–331. https://doi.org/10.1007/s10458-009-9081-1
César-Tondreau, B., Warnell, G., Kochersberger, K., & Waytowich, N. R. (2022). Towards Fully Autonomous Negative Obstacle Traversal via Imitation Learning Based Control. Robotics, 11(4), 67. https://doi.org/10.3390/robotics11040067
Choi, J., & Amir, E. (2009). Combining Planning and Motion Planning. 2009 IEEE International Conference on Robotics and Automation, 238–244. https://doi.org/doi: 10.1109/ROBOT.2009.5152872
Hawes, N. (2011). A survey of motivation frameworks for intelligent systems. Artificial Intelligence, 175(5–6), 1020–1036. https://doi.org/10.1016/j.artint.2011.02.002
Huang, X. (2022). Personalized Travel Route Recommendation Model of Intelligent Service Robot Using Deep Learning in Big Data Environment. Journal of Robotics, 2022, 7778592. https://doi.org/10.1155/2022/7778592
IC Switch 4066. (n.d.). Retrieved July 31, 2022, from http://www.electroschematics.com/wp-content/uploads/2011/04/74VHC4066.pdf
Ingrand, F., & Ghallab, M. (2017). Deliberation for autonomous robots: A survey. Artificial Intelligence, 247, 10–44.
Manzoor, M. F., & Wu, Q. (2015). Control and Obstacle Avoidance of Wheeled Mobile Robot. Proceedings - 7th International Conference on Computational Intelligence, Communication Systems and Networks, CICSyN 2015, 0(2), 235–240. https://doi.org/10.1109/CICSyN.2015.48
McGann, C., Py, F., Rajan, K., Thomas, H., Henthorn, R., & McEwen, R. (2008). A Deliberative Architecture for AUV Control. IEEE International Conference on Robotics and Automation, 1049–1054.
Py, F., Rajan, K., & McGann, C. (2010). A systematic agent framework for situated autonomous systems. AAMAS ’10: Proceedings of the 9th International Conference on Autonomous Agents and Multiagent Systems, 583–590.
Simmons, R. G. (1994). Structured control for autonomous robots. IEEE Transactions on Robotics and Automation, 10(1), 34–43. https://doi.org/10.1109/70.285583
Tang, K.-H., Chao, K.-H., Chao, Y.-W., & Chen, J.-P. (2012). Design and Implementation of a Simulator for Photovoltaic Modules. International Journal of Photoenergy, 2012, 368931. https://doi.org/10.1155/2012/368931
Tu, L.-F., Peng, Q., & Deng, R. (2022). Design and Implementation of Intelligent Control Garbage Bin. Journal of Electrical and Computer Engineering, 2022, 7306548. https://doi.org/10.1155/2022/7306548
Wolfe, J., Marthi, B., & Russell, S. (2010). Combined Task and Motion Planning for Mobile Manipulation. Proceedings of the International Conference on Automated Planning and Scheduling, 254–257.
Youssef, K., Said, S., Alkork, S., & Beyrouthy, T. (2022). A Survey on Recent Advances in Social Robotics. Robotics, 11(4), 75. https://doi.org/10.3390/robotics11040075
Zhang, F. (2022). Design and Implementation of Industrial Design and Transformation System Based on Artificial Intelligence Technology. Mathematical Problems in Engineering, 2022, 9342691. https://doi.org/10.1155/2022/9342691
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Ahmed A. Al-Moadhen, Haider G. Kamil, Ali R. Khayeat

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
All papers should be submitted electronically. All submitted manuscripts must be original work that is not under submission at another journal or under consideration for publication in another form, such as a monograph or chapter of a book. Authors of submitted papers are obligated not to submit their paper for publication elsewhere until an editorial decision is rendered on their submission. Further, authors of accepted papers are prohibited from publishing the results in other publications that appear before the paper is published in the Journal unless they receive approval for doing so from the Editor-In-Chief.
IJISAE open access articles are licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. This license lets the audience to give appropriate credit, provide a link to the license, and indicate if changes were made and if they remix, transform, or build upon the material, they must distribute contributions under the same license as the original.



