
Supporting BIT*-Based Path Planning with MPC-Based Motion Planning of the Self-Driving Car
Keywords:
sampling-based planning, MPC, self-driving car, BIT, motion planningAbstract
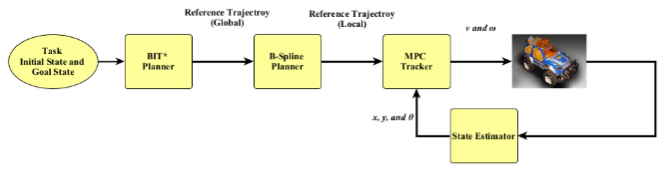
This paper presents the enhanced operation of the path planner integrated with a predictive controller for a self-driving vehicle to accomplish trajectory planning and avoid obstacles. The path planner used the Batch Informed Trees (BIT*) planning algorithm approach and the tracking controller is designed based on the model predictive control (MPC). BIT* algorithm is used to find the best path between the start and the goal nodes. Then the MPC tracks the route and controls the vehicle's movement to its destination. Path planning control is vital point in avoiding autonomous car the obstacles during serious traffic scenarios. The MPC controls the main parameters of the vehicle: velocity, acceleration, and orientation. The traditional BIT* operation is enhanced by subjecting the generated trajectory to a basis spline (B-Spline) planner. This enhancement solves the hard angle and manoeuvre presented in the path, improves the trajectory points connections, and then swiftly obtains a collision-free trajectory. In addition, this paper tackles the issues related to avoiding local obstacles and the follow up of dynamic goal points in a complex and dynamic world. The model predictive controller is used to track the enhanced trajectory plan generated by the BIT*planner approach by using the kinematic model of the vehicle. A modal description of the approach for building the graph-search for these cases and displaying simulated and real-world examining data shows this method's practical application. In the simulation, the controller selects the best trajectories as references. Also, it enhances the performance of trajectory planning and ensures that the casual obstacle can be avoided in real-time and the robot can arrive at the final point smoothly. The results of the simulation show a reasonable accomplishment in navigation performance, the planned path is softer, and the efficiency of the search is higher in composite environments and different scenarios. Also, the test shows that the autonomous car can pursue the reference path accurately, even with sharp corners.
Downloads
References
H. Yang and X. Teng, “Mobile Robot Path Planning Based on Enhanced Dynamic Window Approach and Improved A∗ Algorithm,” Journal of Robotics, vol. 2022, p. 2183229, 2022, doi: 10.1155/2022/2183229.
C. Zhang, D. Chu, S. Liu, Z. Deng, C. Wu, and X. Su, “Trajectory Planning and Tracking for Autonomous Vehicle Based on State Lattice and Model Predictive Control,” IEEE Intelligent Transportation Systems Magazine, vol. 11, no. 2, pp. 29–40, 2019, doi: 10.1109/MITS.2019.2903536.
C. Liu, S. Lee, S. Varnhagen, and H. E. Tseng, “Path planning for autonomous vehicles using model predictive control,” IEEE Intelligent Vehicles Symposium, Proceedings, no. Iv, pp. 174–179, 2017, doi: 10.1109/IVS.2017.7995716.
S. Singh, “Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey,” 2015.
B. Paden, M. Čáp, S. Z. Yong, D. Yershov, and E. Frazzoli, “A survey of motion planning and control techniques for self-driving urban vehicles,” IEEE Transactions on Intelligent Vehicles, vol. 1, no. 1, pp. 33–55, 2016, doi: 10.1109/TIV.2016.2578706.
G. N. Ambewadkar and S. P. Gajre, “Probe path planning for flatness measurement on coordinate measuring machine using ant colony optimization,” Advanced Engineering Forum, vol. 41, pp. 86–91, 2021.
M. Li, F. Zhang, and J. Y. Fang, “Optimal path solution based on Dijkstra algorithm,” Frontiers in Economics and Management,” Frontiers in Economics and Management, vol. 2, pp. 170–176, 2021.
J. Santos, P. M. Rebelo, L. F. Rocha, P. Costa, and G. Veiga, “A∗ based routing and scheduling modules for multiple AGVs in an industrial scenario,” Robotics, vol. 10, no. 2, p. 72, 2021.
S. Karaman and E. Frazzoli, “Incremental sampling-based algorithms for optimal motion planning,” in Robotics: Science and Systems, 2010, vol. 6, pp. 267–274. doi: 10.15607/rss.2010.vi.034.
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,” The international journal of robotics research, vol. 30, no. 7, pp. 846–894, 2011, doi: 10.15607/rss.2010.vi.034.
J. Dai, D. Li, J. Zhao, and Y. Li, “Autonomous Navigation of Robots Based on the Improved Informed-RRT∗ Algorithm and DWA,” Journal of Robotics, vol. 2022, p. 3477265, 2022, doi: 10.1155/2022/3477265.
S. Karaman, M. R. Walter, A. Perez, E. Frazzoli, and S. Teller, “Anytime motion planning using the RRT,” in Proceedings - IEEE International Conference on Robotics and Automation, 2011, pp. 1478–1483. doi: 10.1109/ICRA.2011.5980479.
J. D. Gammell, S. S. Srinivasa, and T. D. Barfoot, “Batch Informed Trees (BIT∗): Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs,” in Proceedings - IEEE International Conference on Robotics and Automation, 2015, pp. 3067–3074. doi: 10.1109/ICRA.2015.7139620.
B. Sahu, P. K. Das, M. R. Kabat, and R. Kumar, “Multi-robot cooperation and performance analysis with particle swarm optimization variants,” Multimedia Tools and Applications, vol. 5, no. 9, pp. 1–24, 2021.
H. Huang, G. Tan, and L. Jiang, “Robot Path Planning Using Improved Ant Colony Algorithm in the Environment of Internet of Things,” Journal of Robotics, vol. 2022, p. 1739884, 2022, doi: 10.1155/2022/1739884.
X. Du, K. K. K. Htet, and K. K. Tan, “Development of a Genetic-Algorithm-Based Nonlinear Model Predictive Control Scheme on Velocity and Steering of Autonomous Vehicles,” IEEE Transactions on Industrial Electronics, vol. 63, no. 11, pp. 6970–6977, 2016, doi: 10.1109/TIE.2016.2585079.
F. Oldewurtel et al., “Use of model predictive control and weather forecasts for energy efficient building climate control,” Energy and Buildings, vol. 45, pp. 15–27, 2012, doi: 10.1016/j.enbuild.2011.09.022.
M. A. Abbas, R. Milman, and J. M. Eklund, “Obstacle avoidance in real time with Nonlinear Model Predictive Control of autonomous vehicles,” Canadian Conference on Electrical and Computer Engineering, vol. 40, no. 1, pp. 12–22, 2014, doi: 10.1109/CCECE.2014.6901109.
A. Koga, H. Okuda, Y. Tazaki, T. Suzuki, K. Haraguchi, and Z. Kang, “Realization of different driving characteristics for autonomous vehicle by using model predictive control,” IEEE Intelligent Vehicles Symposium, Proceedings, vol. 2016-Augus, no. Iv, pp. 722–728, 2016, doi: 10.1109/IVS.2016.7535467.
C. Wang, X. Zhang, K. Guo, F. Ma, and D. Chen, “Application of Stochastic Model Predictive Control to Modeling Driver Steering Skills,” SAE International Journal of Passenger Cars - Mechanical Systems, vol. 9, no. 1, pp. 116–123, 2016, doi: 10.4271/2016-01-0462.
A. Biran, Geometry for naval architects, First edit. Elsevier Ltd, 2018. doi: 10.1016/C2014-0-03962-7.
J. Gallier, Curves and Surfaces In Geometric Modeling: Theory And Algorithms. 2018.
P. Xu, N. Wang, S. L. Dai, and L. Zuo, “Motion planning for mobile robot with modified BIT* and MPC,” Applied Sciences (Switzerland), vol. 11, no. 1, p. 426, 2021, doi: 10.3390/app11010426.
Campion G, Bastin G, and D’andrea-Novel B, “Structural Properties and Classification of Kinematic and Dynamic Models of Wheeled Mobile Robots,” IEEE transactions on robotics and automation, vol. 12, no. 1, pp. 47–62, 1996.
F. Kühne, W. F. Lages, and J. G. da Silva Jr, “Model Predictive Control of a Mobile Robot Using Linearization,” International Journal of Control, Automation and Systems, vol. 13, no. 4, pp. 1868–1879, 2015, [Online]. Available: http://dx.doi.org/10.1016/j.advengsoft.2015.10.008%0Ahttp://dx.doi.org/10.1016/j.robot.2015.04.005%0Ahttp://www.ece.ufrgs.br/~fetter/mechrob04_553.pdf
R. Rajamani, “Vehicle Dynamics and Control,” Springer. p. 496, 2012. doi: 10.1016/b978-0-08-100390-9.00001-4.
F. Borrelli, A. Bemporad, and M. Morari, Predictive Control for Linear and Hybrid Systems. 2017. doi: 10.1017/9781139061759.
J. D. Gammell, T. D. Barfoot, and S. S. Srinivasa, “Batch Informed Trees (BIT*): Informed asymptotically optimal anytime search,” International Journal of Robotics Research, vol. 39, no. 5, pp. 543–567, 2020, doi: 10.1177/0278364919890396.
M. Penrose, Random Geometric Graphs. Oxford: Oxford University Press, 2003. doi: 10.1093/acprof:oso/9780198506263.001.0001.
S. Koenig, M. Likhachev, and D. Furcy, “Lifelong Planning A∗,” Artificial Intelligence, vol. 155, no. 1, pp. 93–146, 2004, doi: https://doi.org/10.1016/j.artint.2003.12.001.
F. Xue and P. R. Kumar, “The number of neighbors needed for connectivity of wireless networks,” Wireless Networks, vol. 10, no. 2, pp. 169– 181, 2004.
E. N. Gilbert, “Random plane networks,” SIAM, vol. 9, no. 4, pp. 533–543, 1961.
J. D. Gammell, S. S. Srinivasa, and T. D. Barfoot, “Informed RRT∗: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic,” 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2997–3004, 2014, doi: 10.1109/IROS.2014.6942976.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Ahmed A. Al-Moadhen, Haider G. Kamil, Ali R. Khayeat

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
All papers should be submitted electronically. All submitted manuscripts must be original work that is not under submission at another journal or under consideration for publication in another form, such as a monograph or chapter of a book. Authors of submitted papers are obligated not to submit their paper for publication elsewhere until an editorial decision is rendered on their submission. Further, authors of accepted papers are prohibited from publishing the results in other publications that appear before the paper is published in the Journal unless they receive approval for doing so from the Editor-In-Chief.
IJISAE open access articles are licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. This license lets the audience to give appropriate credit, provide a link to the license, and indicate if changes were made and if they remix, transform, or build upon the material, they must distribute contributions under the same license as the original.



